AGV - Veicolo a guida automatica per movimentazione pallet
Riferimenti
Intervento realizzato avvalendosi del finanziamento POR-FESR Calabria 14/20
Asse 1 Azione 1.2.2
CUP: J18C17000560006
Obiettivi
Lo scopo di questa ricerca è lo studio di una soluzione hardware e software per la realizzazione di un veicolo a guida automatica (AGV - Automated guided vehicle) per la movimentazione della merce (pallet) nei magazzini.
In questa proposta si vuole realizzare un nuovo tipo di AGV, con lo scopo di avere un basso costo dell’infrastruttura (cablaggi e/o installazioni nel magazzino) e della manutenzione, basandosi su nuove tecnologie quali:
• RTK-GPS, sistema GPS avanzato che grazie ad una stazione base e ad opportune correzioni riesce a portare la precisione a circa 4cm.
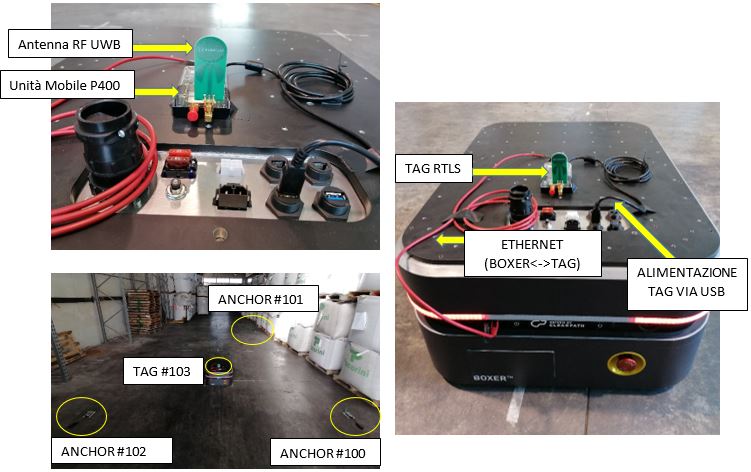
• RTLS, sistema di localizzazione real-time, basato su impulsi ultra-wide band, le attuali soluzioni commerciali permettono una precisione del posizionamento di 20cm.
Un ulteriore aspetto che verrà studiato in questa ricerca è il sistema per il carico / scarico automatico del prodotto trasportato.
Risultati
Le soluzioni studiate, sviluppate e prototipizzate sono le seguenti:
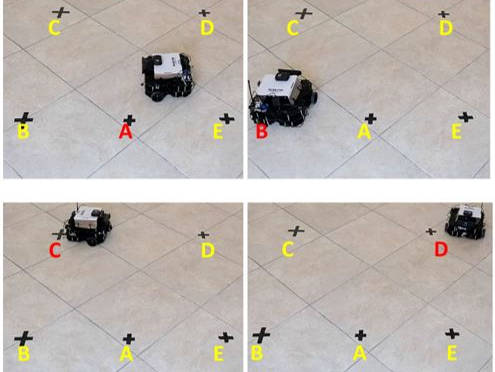
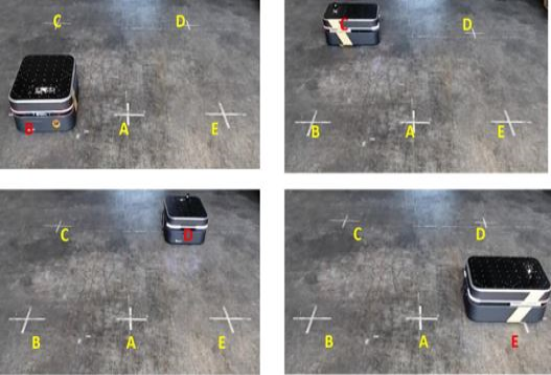
• Sistema di navigazione per AGV in ambienti interni basato su RTLS
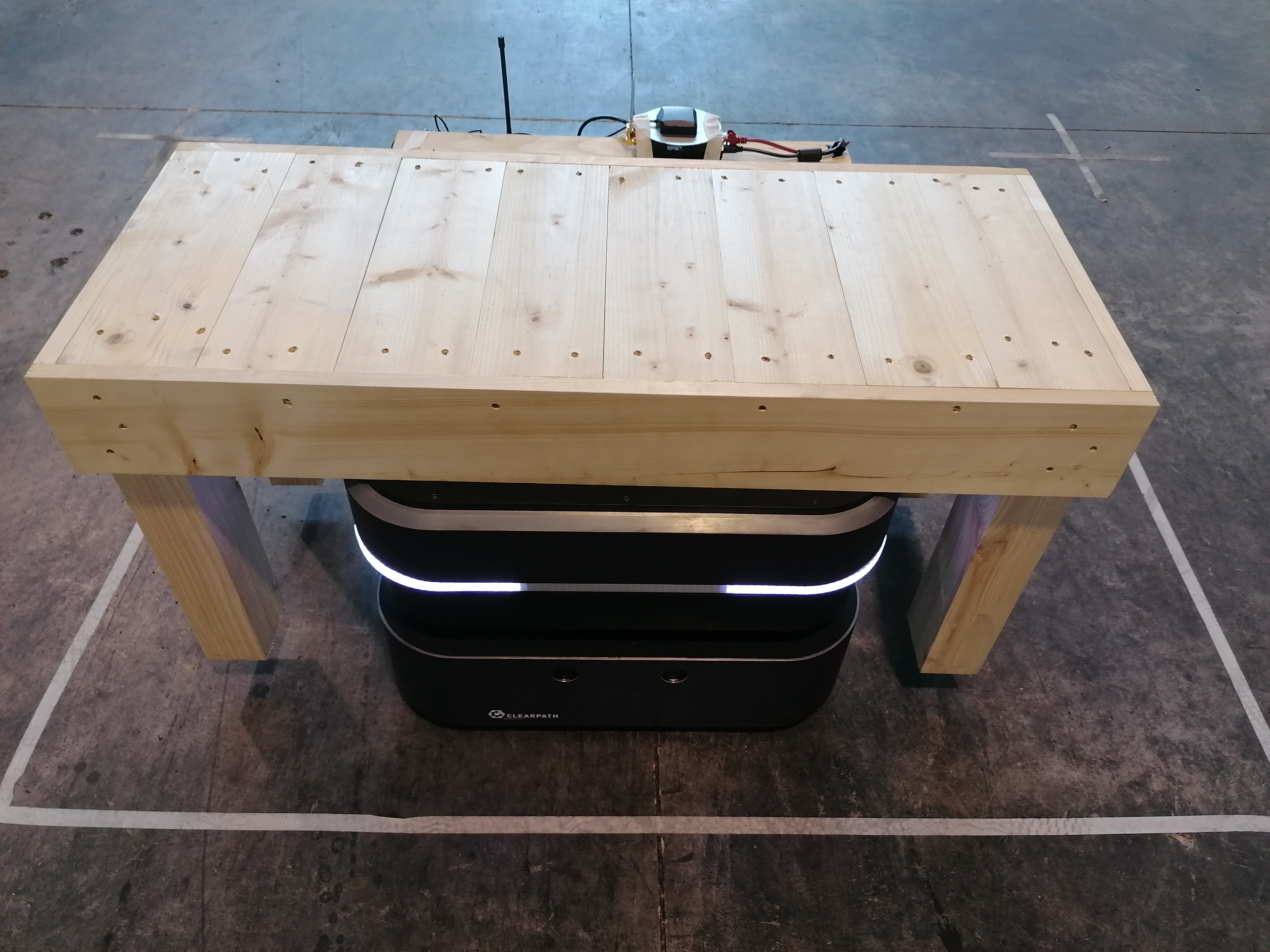
Con l’integrazione del sistema RTLS su AGV si dà dimostrazione oggettiva e misurabile di quello che è il miglioramento – in termini di precisione - introdotto da un sistema di localizzazione ad-hoc, dimostrando al contempo l’impraticabilità di una soluzione di localizzazione basata sull’utilizzo dei soli sensori di bordo, se ci si prefigge di far operare l’AGV in modo continuativo per diverse ore. Dopo l’integrazione del sistema RTLS all’interno del framework ROS siamo pertanto in grado di far muovere il veicolo in modo del tutto autonomo da un punto di partenza ad un punto di arrivo specificato, con una accuratezza di circa 10 cm, su di un percorso relativamente semplice e privo di ostacoli, e per un tempo indefinito. È stata anche presa in considerazione la problematica della navigazione su una mappa non vuota e in presenza di pareti e/o ostacoli fissi. È stata generata una mappa ad-hoc dello scenario considerato, tramite le funzionalità SLAM messe a disposizione dal framework ROS. È stata prevista successivamente la presenza di un carico a bordo e sono stati implementati i dovuti accorgimenti affinché quest’ultimo non venga rilevato come ostacolo mandando in stallo l’esecuzione della navigazione. È stata verificata la capacità del sistema di portarsi sui goal indicati trasportando un carico a bordo e in una mappa più complessa dello scenario precedente, effettuando in piena autonomia le opportune manovre per evitare gli ostacoli. È stato verificato che il sistema mantiene l’accuratezza già misurata precedentemente (10 cm). Siamo pertanto attualmente in grado di portare in sicurezza un carico generico da un punto A ad un punto B in una zona operativa indoor.
• Sistema di navigazione per AGV in ambienti esterni basato su RTK-GPS
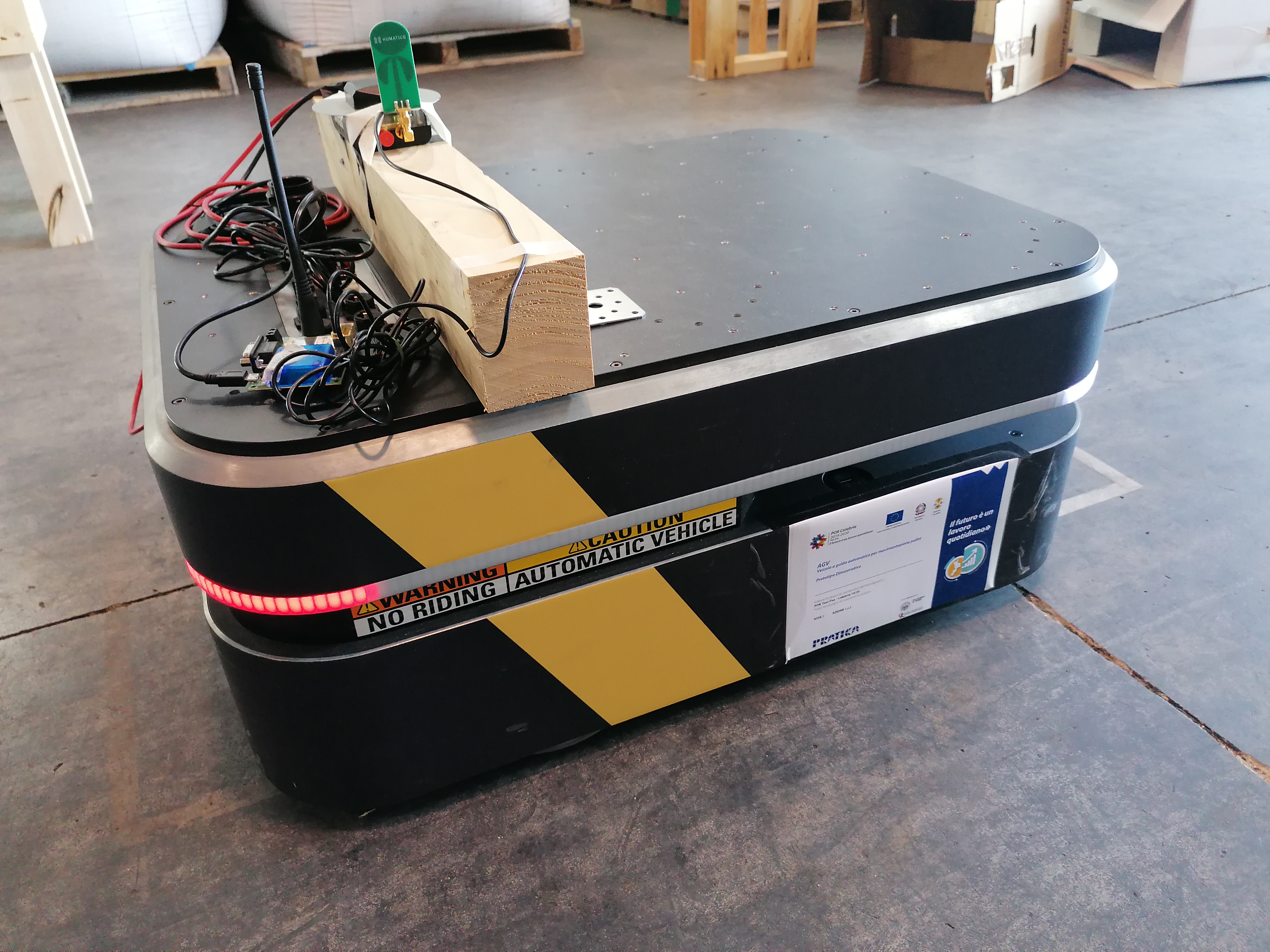
In analogia all’integrazione del sistema RTLS, adeguato ad ambienti indoor, l’integrazione di un sistema GPS differenziale consente di migliorare notevolmente le prestazioni in termini di precisione del sistema di navigazione, ma in ambiente outdoor. L’esperimento è stato condotto creando una zona di test in ambiente outdoor quanto più possibile sgombra di oggetti che potessero interferire con la ricezione del segnale GPS, su una pavimentazione adeguata al prototipo e simile a quella adoperata in ambiente indoor. Tramite i dati di localizzazione forniti con precisione da quest’ultimo ed integrati opportunamente nel framework ROS, siamo pertanto in grado di far muovere il veicolo in modo del tutto autonomo, in ambiente outdoor, da un punto di partenza ad un punto di arrivo specificato, con una accuratezza di circa 7 cm, su di un percorso relativamente semplice, privo di ostacoli e con una buona visibilità dei satelliti GPS.
• Sistema di navigazione ibrido indoor outdoor (combinazione dei precedenti)
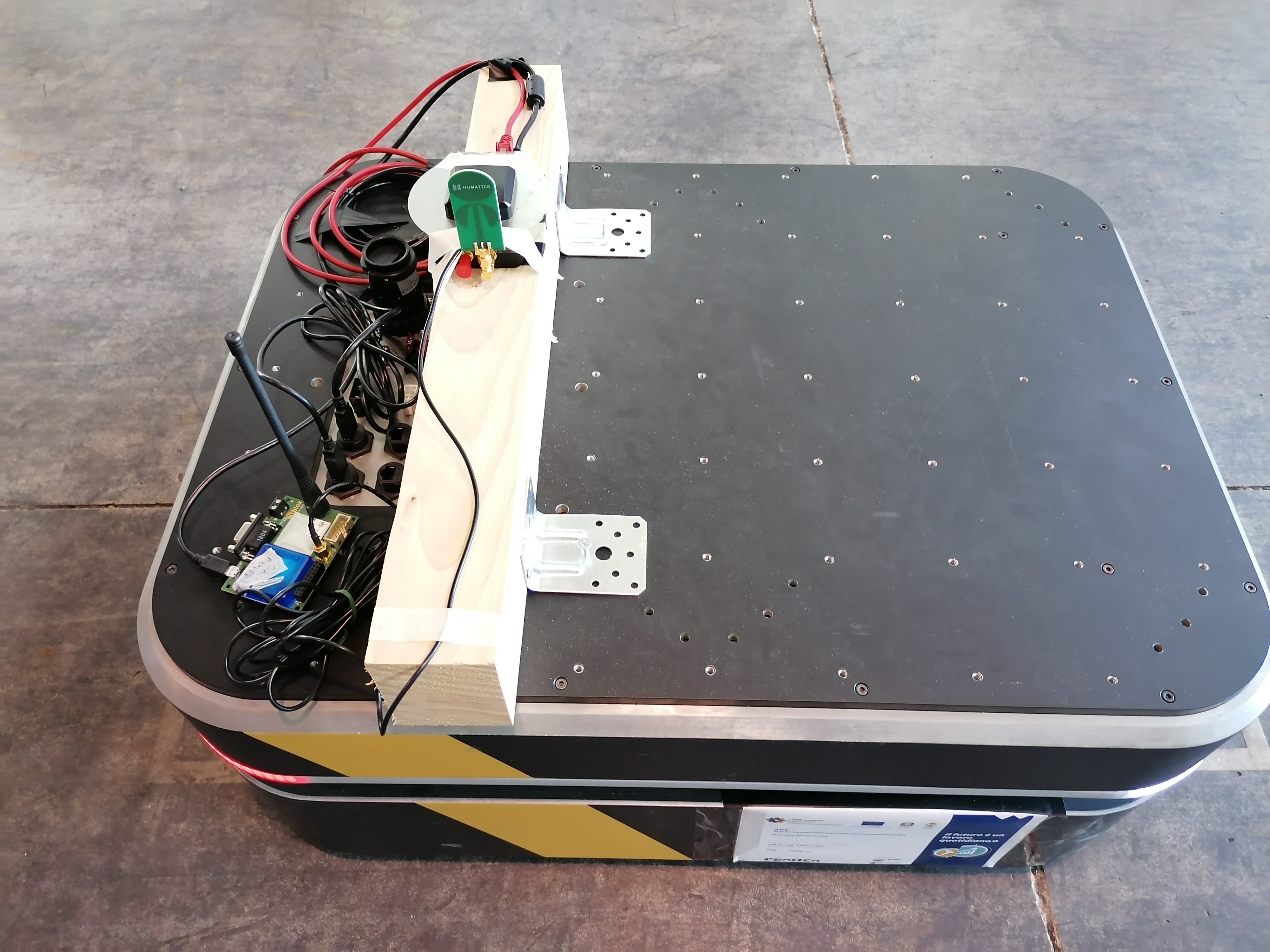
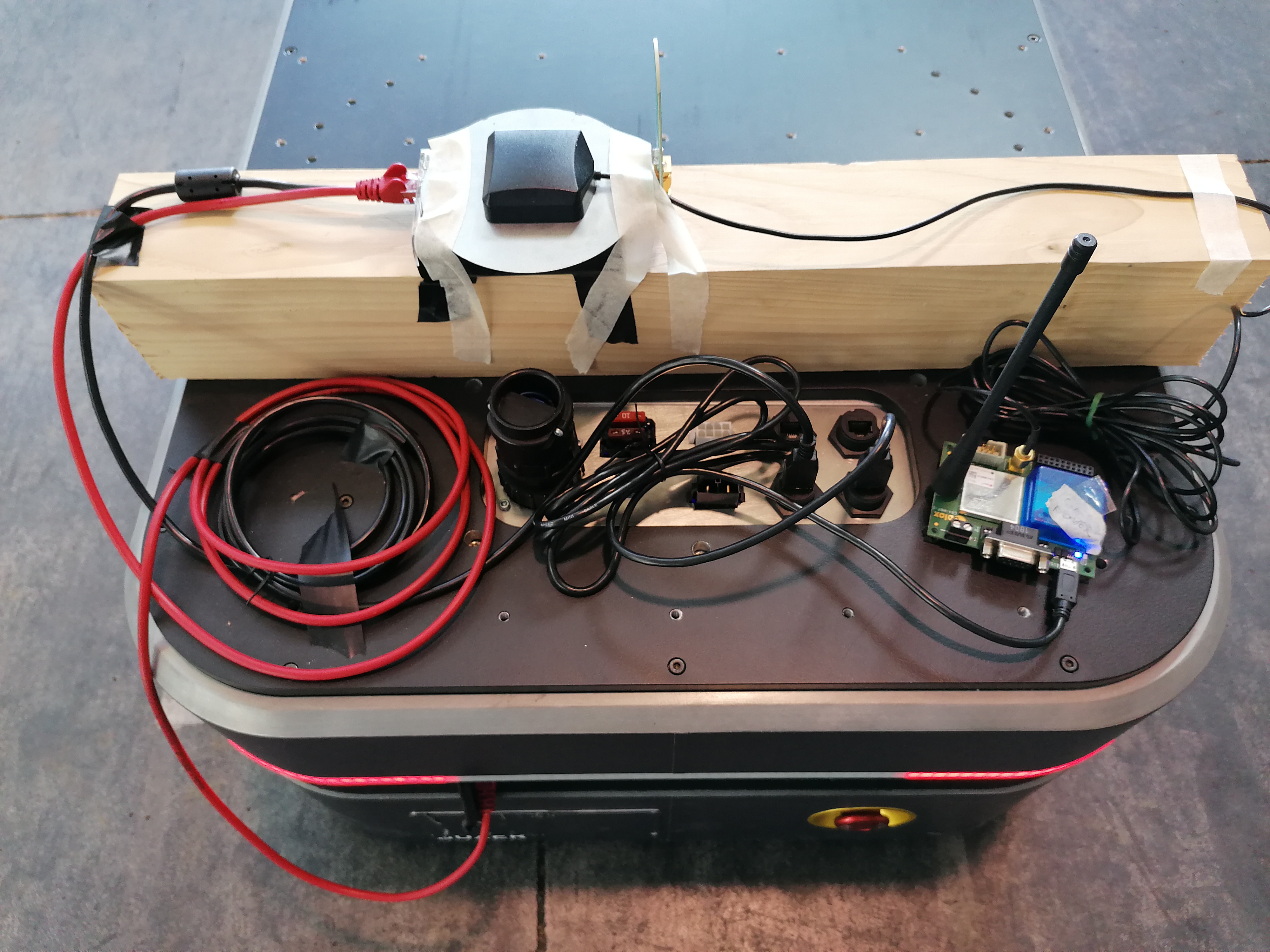
Questa nostra realizzazione, basata sul sistema open source ROS (Robot Operating System), ci ha permesso di ottenere un prototipo di sistema di navigazione per AGV, funzionante sia all’interno che all’esterno. Mediante il software di controllo su PC si fornisce un GOAL su una mappa, cioè un insieme di coordinate di x, y e l’angolo arrivo, il sistema genera i percorsi in real-time, legge la sensoristica e genera i comandi per i motori muovendo il veicolo. Grazie a questo progetto, siamo in grado di movimentare tutte le tipologie di veicolo, a due, tre quattro ruote non Ackermann cioè con il centro di raggio interno al veicolo stesso (veicoli in grado di ruotare su sé stessi).
• Sistema Carico/Scarico pallet
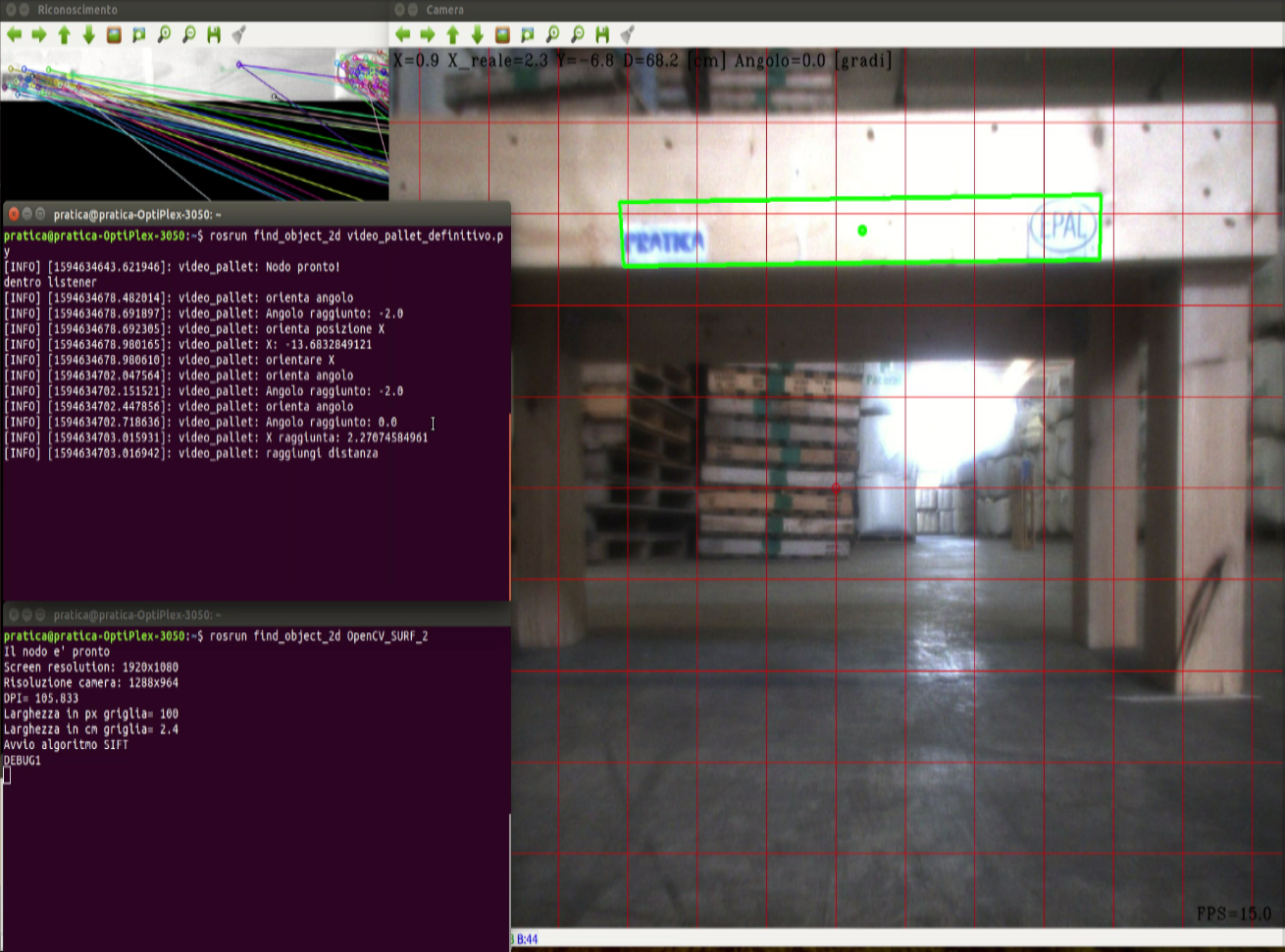
Tramite gli scenari precedenti il Boxer raggiunge le coordinate (X, Y) sulla mappa nota, di fronte al pallet, con una certa precisione, poi interviene il sistema di riconoscimento immagini che individua e riconosce il pallet e permette l’allineamento del robot con alta precisione. Viene simulato l’avanzamento dello stesso sino al posizionarsi sotto il pallet, successivamente per caricarselo e trasportarlo nella zona di scarico. Il software di riconoscimento funziona perfettamente, acquisendo i valori di X, distanza e angolo. Una volta ricevuto il via, lo script che permette l’allineamento entra in funzione, grazie ai dati del software si orienta e sistema la posizione e l’angolazione del robot rispetto alla pedana, per poi raggiungerla percorrendo la distanza corretta.
• Sistema Carico/Scarico scaffale
Questa realizzazione consiste in un sistema di riconoscimento immagini basato su telecamera, in grado di riconoscere, in base alla configurazione, un pallet o uno scafale e fornirne la posizione, cioè quanto sono disallineato rispetto ad esso. Questa informazione viene gestita del software di navigazione per allinearsi in modo preciso al pallet / scaffale ed eseguire le manovre di carico scarico. Il sistema di riconoscimento immagini può essere anche utilizzato come strumento a sé stante, per fornire all’Operatore dei muletti a forche un sistema in grado di aiutarli durante le operazioni di carico e scarico, rendendo la manovra più sicura.
• Studio radar anticollisione
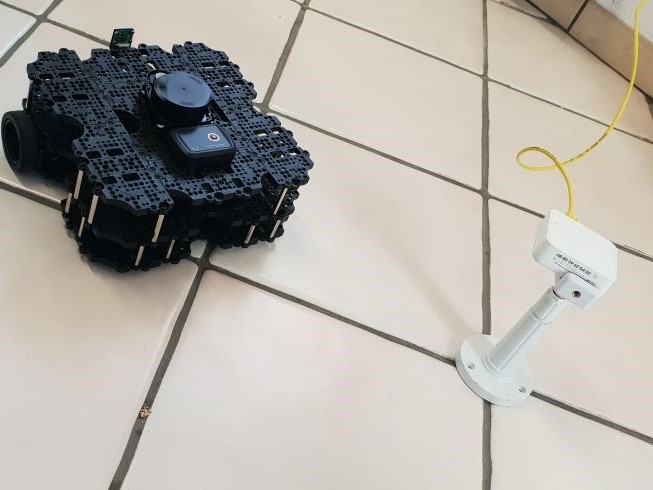
Per la sicurezza degli AGV è stato studiato un radar anticollisioni, basato sul principio del Time Of Flight (TOF), che utilizza la luce infrarossa. L'applicazione di questo sistema radar è la prevenzione delle collisioni per gli AGV che si muovono autonomamente in un ambiente. In tali circostanze, il veicolo deve essere in grado di valutare la vicinanza di oggetti e ostacoli, valutare se sono troppo vicini e, nel caso, impostare un allarme per arrestare o modificare il movimento.
Sviluppi futuri
In futuro si cercherà di trovare degli accordi economici con ditte produttrici di muletti a forche / transpallet / meccaniche per la realizzazione di un prodotto commerciale.
Link utili
Repository Github con parte del codice sorgente
https://github.com/PraticaSRL/AGV
Canale Youtube con alcune demo video
https://www.youtube.com/channel/UC729DES3LetqVlaYN8TUeLg/videos

.png)

.JPG)



.JPG)
.JPG)